Going back and tracing the statistics of the robotic world, researchers have bent on designing robotic hands that mimic the dexterity of human hands in the ways they grasp and manipulate objects. But one of the major downsides of the earlier versions of these robotic hands is that they lack the ability to withstand the physical impacts that can occur in unstructured environments. A research team has now developed a compact robotic finger for dexterous hands, with the perk of being capable of withstanding physical impacts in its working environment. That is to say, a robotic finger that can withstand physical impact is now possible. What great news!
Since robots are known to often work in environments that are unpredictable and sometimes unsafe. It is impossible to avoid physical collisions; especially when these multi-fingered robotic hands are required to work in an unstructured environment. These are situations in which obstacles move quickly or the robot must interact with humans or other robots.
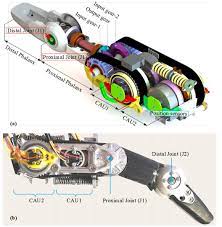
It has been noticed in the past that the energy generated by these physical impacts can damage the hardware systems of the robotic hands. Since they are rigid in structure, and therefore can be easily damaged by physical impacts and collisions. The research focused on designing robots equipped with sturdy, dexterous hands that can withstand the kinds of physical impacts mentioned here. The team worked to create a robotic finger, a mimic of the human finger in dexterity and also in its ability to absorb and withstand physical impacts.

Speaking to the public about the Robotic finger that can withstand physical impact; Yiwei Liu, a professor at the Harbin Institute of Technology, China said, “This will enable the dexterous hand to have better mechanical robustness, thus solving the problem that the rigidly driven dexterous hand is easily damaged by physical collisions in unstructured environments.”
Read More
Conclusion
Just as in the human body, where the muscles’ natural stiffness and flexibility vary depending on the task at hand. By creating a variable stiffness actuator system, current robotic hand technology mimics this. This approach of using such designs in these systems makes the robotic hand’s dexterous characteristics possible. The inclusion of the variable stiffness actuators works to bring human-like flexibility and stiffness adjustment to the robotic hand, depending on the task to be performed. Making possible a robotic finger that can withstand physical impact.
This is a huge step in the development of robotics. IF this can be made to be interfaceable with human beings, it can play a major role in assisting people with disabilities. People like war veterans who lost an arm in wars can now be proud. Let us know what you think in the comment section.