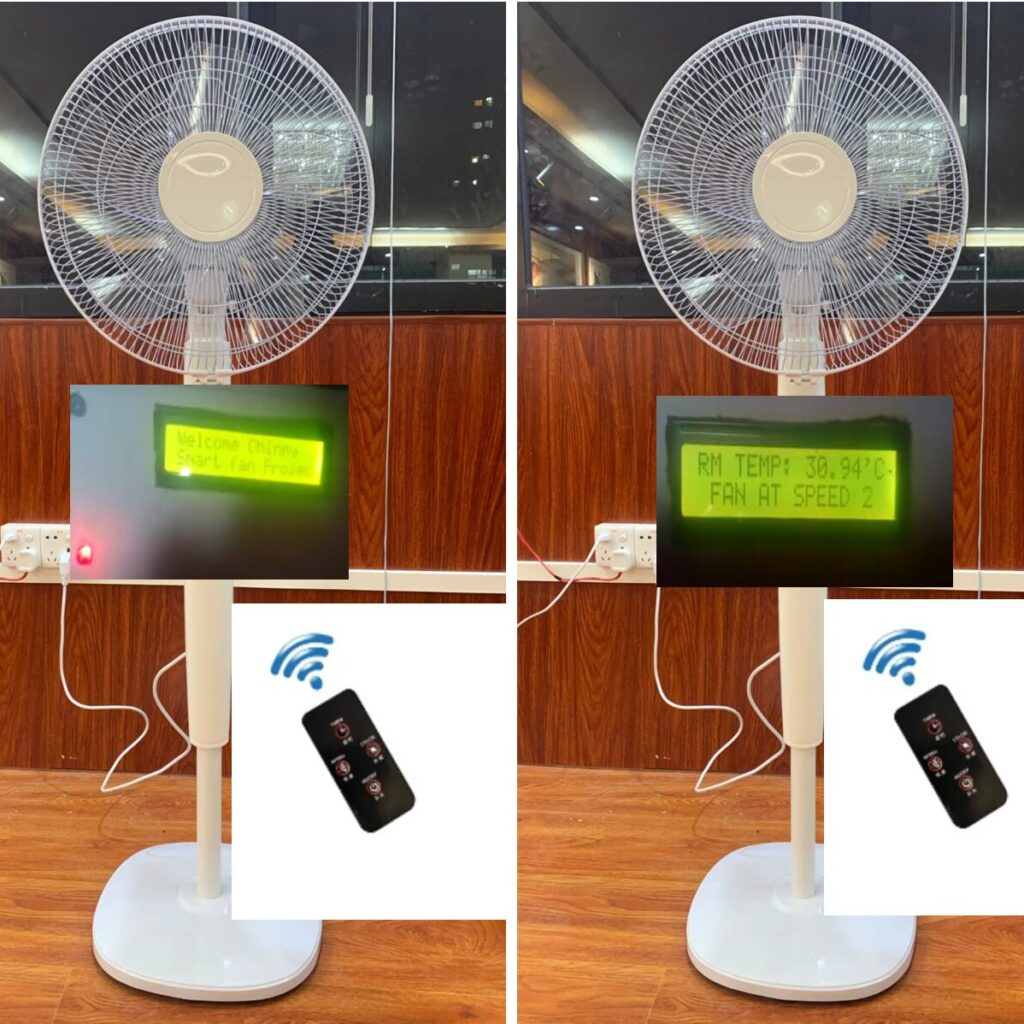
This Power Management System for Home-A Smart Fan Project transforms a standing air conditioning fan into a smart automated version that detects human presence using a passive infrared (PIR) sensor and then sets two distinct time modes using a real-time clock (RTC). The “Auto Sense Mode” and “Remote Active Mode” in particular. The user could utilize the remote control to access the desired speed selection during the “working hour,” also referred to as the “Remote Active Mode.” The fan operates on its own while it is in Auto Sensing mode. The fan knows when to switch to auto mode thanks to the RTC sensor. It may then use the PIR sensor to identify human movements and determine whether someone is in need. During the Auto Sensing mode, the fan controls itself automatically. With the RTC sensor, the fan can tell when it is time for auto mode. And then, using the PIR sensor, it could detect human motion and know when there is somebody around needing cool air ventilation. If the fan senses motion, it would turn itself on and run at a constant speed, which is the speed of two. But if, after some time, it couldn’t detect any motion, it would turn itself off.
Materials/Components Needed
1. Pedestal Fan

A standing electric fan designed to circulate air efficiently in a room. It typically has adjustable height, oscillation, and speed settings.
2. Atmega328P IC

A widely used 8-bit microcontroller from the AVR family, commonly found in Arduino boards. It controls input/output devices, processes data, and runs embedded programs.
3. 16MHz Crystal Oscillator

A timing device that provides a stable 16 MHz clock signal to the microcontroller, ensuring accurate processing speed and synchronization of operations.
4. 1602 LCD Module

A 16×2 character Liquid Crystal Display used to show alphanumeric information, such as sensor readings, status messages, or system outputs.
5. 10k Potentiometer

A variable resistor used to adjust voltage levels. Commonly used to control the contrast of LCD displays or tune analog signals.
6. 3-Channel Relay Module

An electronic module that allows the microcontroller to switch high-voltage devices (like fans, lamps, or motors) on and off safely through low-voltage digital signals.
Buy Full complete kit for this project on our online store or contact us via WhatsApp
Circuit/Schematic Diagram
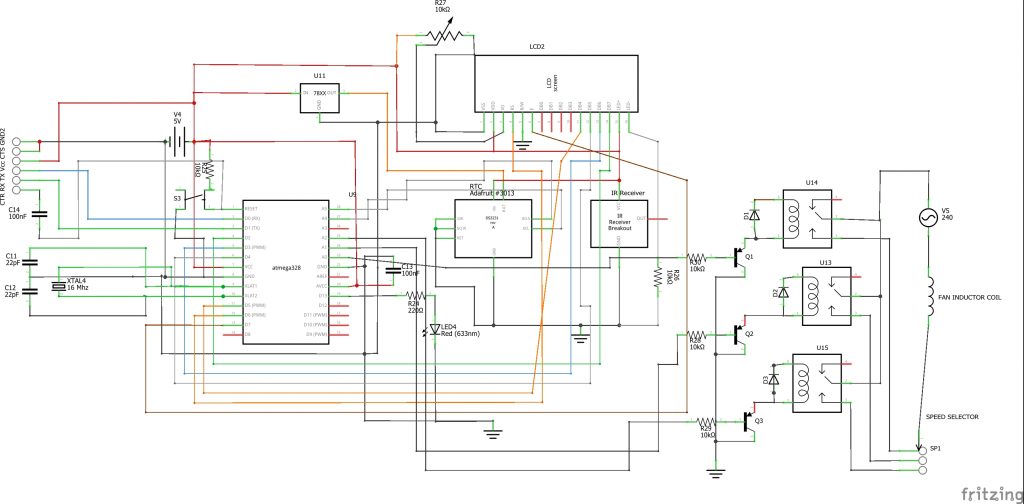
The project design started with us designing the circuit diagram using the Fritzing circuit IDE. As shown in the picture below.
Circuit Diagram Explanation
Following the circuit diagram, we built the standalone development board around the Atmega328P-U microcontroller. For other projects that used Atmega328P-PU microcontroller, check out: Atmega328P-U projects
So here, the atmega328P-U microcontroller unit (MCU) is programmed using the FTDI ISP programmer as shown above. We used a DS3231 type of RTC to keep and set our time. We used a PIR sensor to detect the motion also. The connection is set such that the serial clock pin (SCL) and the serial data pin (SDA) of the RTC are connected to the analog pin 5 (A5) and analog pin 4 (A4) of the MCU, respectively. The PIR output is connected to the digital pin 10 of the Atmega328P-U.
Next that catches our interest is the 16×4 LCD connection. As shown in the circuit diagram, we are using the 4-bit connection mode (4-wire type connection). We wired Register Select (RS) to MCU D3, Enable pin (E) to D4, and the four data pins to digital pins 8 through 5.
Note: If you are using a power supply that has a DC output above 5V, you have to use a voltage regulator as shown in the circuit diagram to buck it down to 5V since the MCU uses a 5V DC output. But ensure that your 5V meets up to 3A. Otherwise, during relay switching, the LCD screen may scatter and start misbehaving. Also, if you don’t use a 5V DC supply, the whole system will end up getting fried.
To switch the states of the AC standing fan, we need a 3-channel relay module to change the speed controls automatically.

Here we disconnected the normal speed selector switch found on the standing fan and extended it with more wires. Then the AC live wire is connected to the common of the relays while the respective speed lines are connected to the other three, as shown in the picture above. The neutral line of the AC is connected to the neutral of the fan induction coil.
Arduino Source Code
After the connection has been made, the PIR sensor and the RTC are connected too to the MCU board. The LCD module is connected to its header pin. Next is to program the MCU. Copy the code below into your Arduino IDE.
#include <Wire.h>
#include <RTClib.h>
#include <EEPROM.h>
#include <IRremote.h>
#include <LiquidCrystal.h>
LiquidCrystal lcd(3, 4, 8, 7, 6, 5);
RTC_DS3231 rtc;
char daysOfTheWeek[7][12] = {"Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday"};
#define speed1 A0
#define speed2 A1
#define speed3 A2
int RECV_PIN = 2;
const int PIR = 10;
unsigned long count = 0;
int state = LOW;
int currentState = 0;
int previousState = 0;
int sensor_count = 0;
int timer = 0;
int ts = 50;
int tc = ts;
int sc = 10;
int fail = 0;
int ms = 50;
unsigned long pm = 0;
const long interval = ms;
boolean logic;
byte val0 = EEPROM.read(0);
byte val1 = EEPROM.read(1);
byte val2 = EEPROM.read(2);
int ontime = val1;
int offtime = val2;
int menu = 0;
int pause = 50;
int rtcDAY, rtcMONTH, rtcYEAR, rtcHOUR, rtcMIN, rtcSEC;
int minus = 0;
int plus = 0;
int fan = 0;
String remote;
String stat = "";
String SPEED = "";
IRrecv irrecv(RECV_PIN);
decode_results results;
void page(){
DateTime now = rtc.now();
lcd.setCursor(0, 0);
lcd.print("RUKE's SMART FAN");
lcd.setCursor(0, 1);
lcd.print(SPEED);
lcd.setCursor(0, 2);
lcd.print(stat);
lcd.setCursor(0, 3);
lcd.print(now.day(), DEC);
lcd.print('/');
lcd.print(now.month(), DEC);
lcd.print('/');
lcd.print(now.year(), DEC);
lcd.print(" ");
lcd.print(now.hour(), DEC);
lcd.print(':');
lcd.print(now.minute(), DEC);
}
void fanOff(){
//turn the fan off
analogWrite(speed1, 255);
analogWrite(speed2, 255);
analogWrite(speed3, 255);
SPEED = " FAN OFF ";
}
void spd1(){
//turn the fan off
analogWrite(speed1, 0);
analogWrite(speed2, 255);
analogWrite(speed3, 255);
SPEED = " speed 1 ";
}
void spd2(){
//turn the fan off
analogWrite(speed1, 255);
analogWrite(speed2, 0);
analogWrite(speed3, 255);
SPEED = " speed 2 ";
}
void spd3(){
//turn the fan off
analogWrite(speed1, 255);
analogWrite(speed2, 255);
analogWrite(speed3, 0);
SPEED = " speed 2 ";
}
void SenSe(){
unsigned long cm = millis();
unsigned long rr = cm - pm;
if(rr > interval){
if(digitalRead(PIR)==HIGH){
sensor_count = sensor_count + 1;
}
timer = timer + 1;
pm = cm;
if(timer >= tc){
if((sensor_count >= sc) && (tc >= ts)){
spd2();
tc = 0;
fail = 0;
}
else{
fail = fail + 1;
tc = ts;
//interval = ms;
}
timer = 0;
sensor_count = 0;
}
}
if(fail > 20){
fail = 0;
fanOff();
}
}
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
lcd.begin(16, 4);
pinMode(speed1, OUTPUT);
pinMode(speed2, OUTPUT);
pinMode(speed3, OUTPUT);
pinMode(PIR,INPUT);
if (! rtc.begin()) {
lcd.setCursor(0, 0);
lcd.print("Can't find RTC");
delay(3000);
while (1);
}
if (rtc.lostPower()) {
lcd.setCursor(0, 0);
lcd.print("RTC lost power!");
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
delay(3000);
}
// In case the interrupt driver crashes on setup, give a clue
// to the user what's going on.
Serial.println("Enabling IRin");
irrecv.enableIRIn(); // Start the receiver
Serial.println("Enabled IRin");
fanOff();
}
void loop() {
// put your main code here, to run repeatedly:
DateTime now = rtc.now();
rtcHOUR = now.hour(), DEC;
if (irrecv.decode(&results)){
remote = String(results.value, HEX);
if(remote == "511dbb"){
menu = 1;
}
Serial.println(menu);
Serial.println(fan);
Serial.println(remote);
irrecv.resume(); // Receive the next value
}
if((rtcHOUR >= ontime) && (rtcHOUR <offtime))//Comparing the current time with the Alarm time
{
stat = " Auto Mode ";
SenSe();
}
else{
if(remote == "c101e57b"){
fanOff();
}
if(remote == "9716be3f"){
spd1();
}
if(remote == "3d9ae3f7"){
spd2();
}
if(remote == "6182021b"){
spd3();
}
stat = " Remote Active ";
}
if(menu < 1){
page();
}
menu = constrain(menu, 0, 5);
switch(menu){
case 1:
lcd.setCursor(0, 0);
lcd.print("**Control MENU** ");
lcd.setCursor(0, 1);
lcd.print(">1. FAN ON Time ");
lcd.setCursor(0, 2);
lcd.print(" 2. FAN OFF Time ");
lcd.setCursor(0, 3);
lcd.print(" 3. EXIT MENU ");
if(remote == "a3c8eddb"){
menu++;
if(menu > 3){
menu = 1; }
}
if(remote == "f076c13b"){
menu--;
if(menu < 1){
menu = 3; }
}
if(remote == "e5cfbd7f" && menu == 1){
menu = 4;
}
break;
case 2:
lcd.setCursor(0, 0);
lcd.print("**Control MENU** ");
lcd.setCursor(0, 1);
lcd.print(" 1. FAN ON Time ");
lcd.setCursor(0, 2);
lcd.print(">2. FAN OFF Time ");
lcd.setCursor(0, 3);
lcd.print(" 3. EXIT MENU ");
if(remote == "a3c8eddb"){
menu++;
if(menu > 3){
menu = 1;}
}
if(remote == "f076c13b"){
menu--;
if(menu < 1){
menu = 3; }
}
if(remote == "e5cfbd7f" && menu == 2){
menu = 5;
}
break;
case 3:
lcd.setCursor(0, 0);
lcd.print("**Control MENU** ");
lcd.setCursor(0, 1);
lcd.print(" 1. FAN ON Time");
lcd.setCursor(0, 2);
lcd.print(" 2. FAN OFF Time");
lcd.setCursor(0, 3);
lcd.print(">3. EXIT MENU ");
if(remote == "a3c8eddb"){
menu++;
if(menu > 3){
menu = 1;}
}
if(remote == "f076c13b"){
menu--;
if(menu < 1){
menu = 3;
}
}
if(remote == "e5cfbd7f" && menu == 3){
menu = 0; }
break;
case 5:
lcd.clear();
offtime = constrain(offtime, 0, 23);
lcd.setCursor(0, 0);
lcd.print(" SET AC OFF Time: ");
lcd.setCursor(0, 2);
lcd.print("New Time = ");
lcd.print(offtime);
lcd.print(":00 ");
if(remote == "a3c8eddb"){
offtime++;
if(offtime > 23){
offtime = 0;
}
}
if(remote == "f076c13b"){
offtime--;
if(offtime < 0){
offtime = 23;
}
}
if(remote == "e5cfbd7f" && menu == 5){
EEPROM.update(2, offtime);
menu = 2;
}
break;
case 4:
lcd.clear();
ontime = constrain(ontime, 0, 23);
lcd.setCursor(0, 0);
lcd.print(" Set FAN ON Time ");
lcd.setCursor(0, 2);
lcd.print("New Time = ");
lcd.print(ontime);
lcd.print(":00 ");
if(remote == "a3c8eddb"){
ontime++;
if(ontime > 23){
ontime = 0;}
}
if(remote == "f076c13b"){
ontime--;
if(ontime < 0){
ontime = 23;}
}
if(remote == "e5cfbd7f" && menu == 4){
EEPROM.update(1, ontime);
menu = 1;
}
break;
}
remote = "";
delay(50);
}
Arduino Sketch Explanation
As shown from above, four libraries are needed in this Power Management System for Home- A Smart Fan Project sketch: the RTC library, the lcd library, the IR receiver library and the EEPROM lib. Although some of these libraries are already in the Arduino IDE.
You can change the time for the Remote active mode and the Auto mode in the design after successful uploading the code and using your remote controller to adjust it. To design which of the button does your bidding, you have to run the IR receiver test and map out the received IR HEX values. Then you would in turn use these HEX codes, to assign a specific command in the IF statement you coded.
We used Analog pins for your relay module inputs which in turn controls the AC fan speeds and we defined in the code lines above. The page function greeting message could be altered to any of the programmer’s choice. functions like fanOff(), spd1(), spd2() and spd3() were used to control the state of each relay on the relay module and which in turn regulate the fan speed. As seen in the sketch, function fanOff() turns off all the inputs of the relay module by gving them 8-bit -1 (255) voltage level (which is a HIGH). Since the relay module is active LOW, this would turn off all the inputs.
function Sense() controls the PIR sensor and its counting mechanism. Virtually, we just increased the delay time to 10 seconds (int sc =10). After 20 seconds in the auto mode, if it doesn’t sense any motion, it automatically turns off.
A visual of the Power Management System for Home-A Smart Fan Project is given below for more explanation.
Conclusion
And that is it for this post. If you have any questions, just leave a comment in the comment section below. You can also see our other posts or check out our online store if you are a tech enthusiast. Let us know how we can assist you. Any time!
Thank you.