Technological developments have created fascinating opportunities for space research that may eventually yield fresh insights about the celestial objects in our galaxy. Robots have shown to be incredibly effective tools for exploring other worlds, especially Mars, a terrestrial planet in the solar system that is believed to contain some components that are comparable to those on Earth.
It would be exciting to explore Mars and its surface in search of evidence of past or contemporary extraterrestrial life. These investigations may reveal different types of prehistoric microbial life as well as resources that are not found on Earth, opening the door for future manned expeditions to Mars.
A new four-legged robot that was recently created by Nanjing University of Aeronautics and Astronautics in inspiration from lizards may help with surface exploration on Mars. Their robot, which was published in MDPI’s Biomimetics magazine, features a flexible body structure that can mimic the motions and mode of locomotion of a desert lizard.
“To assist ambitious uncrewed missions to Mars, specific types of planetary rovers have been developed for performing tasks on Mars’ surface,” Guangming Chen, Long Qiao, Zhenwen Zhou, Lutz Richter and Aihong Ji wrote in their paper. “Due to the fact that the surface is composed of granular soils and rocks of various sizes, contemporary rovers can have difficulties in moving on soft soils and climbing over rocks. To overcome such difficulties, this research develops a quadruped creeping robot inspired by the locomotion characteristics of the desert lizard.”
The biomimetic robot created by Chen and his colleagues is comprised of a flexible spine-like structure and four legs. To replicate the “creeping” motion typical of lizards, every leg features two hinges and a gear that elicits a swinging movement.
The robot can lift without losing equilibrium thanks to the four-linkage system and two servos that are used in each hip joint that connects the spinal structure to the legs. The four flexible “toes” of the robot’s “feet” are made up of two hinges and a claw.
The researchers wrote in their study, “The leg structure incorporates a four-linkage mechanism, which assures a stable lifting motion. The foot is made up of a flexible circular pad with four toes that are good at grabbing soil and pebbles and an active ankle.
The researchers developed a number of kinematics models for each of the parts of their robot in order to simulate lizard motions. They then planned the movements of the robot using these models and numerical calculations.
In their research, Chen and his colleagues stated that “kinematic models relating to foot, leg, and spine are constructed” to predict robot motions. Furthermore, numerical proof is provided for the coordinated leg and trunk movements.
To test if their robot could accurately mimic lizard movements, the researchers first put it through a series of simulations. They discovered that their robot could carry out the specified motions and walking style, which gave them highly encouraging results.
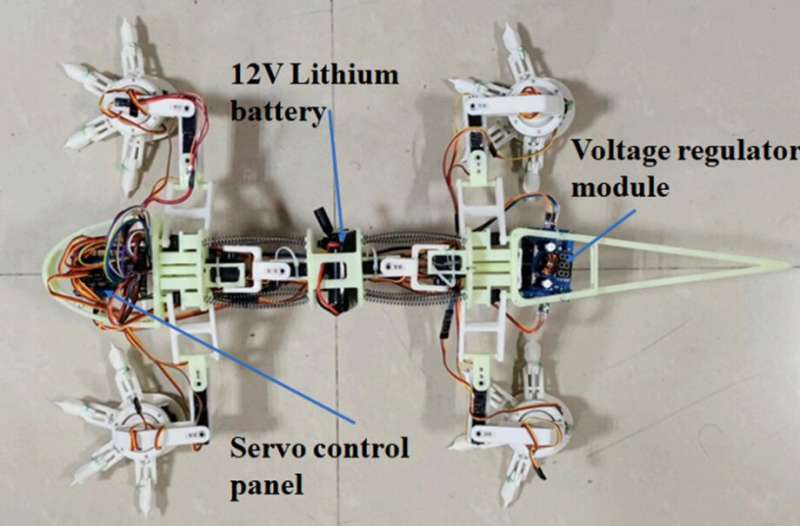
With the use of 3D-printed resin materials, a servo control panel, a lithium battery, and other electronic components, Chen and his colleagues have already built a prototype of their robot. The movements of their prototype robot were then assessed using a testbed simulation of rocky terrain similar to those seen on Mars.
Scientists discovered that the robot could maneuver well in difficult terrain, indicating its potential for future expeditions to Mars. The researchers will need to work on it more before it can be used and tested outside of the lab, such as by adding a sealing mechanism to keep out dirt or airborne dust and strengthening the body with more durable materials.
Working on machine learning models will enable Chen and his team’s robot to adjust its motions to various terrains. They also intend to implement a mechanism that will supply the robot with constant electricity.