A highly maneuverable quadrotor drone with trajectory tracking capabilities has been created by a team of researchers from the University of Zurich. The crew details how they created their drone, the components they used, and how well it performed during testing in their research that was published in the journal Science Robotics software Autonomous.
Quadrotor drones are capable of maneuvering with great agility, especially when a human pilot is controlling them. On the other side, autonomous quadrotors have experienced problems with agility, especially when moving quickly. With their innovative design created utilizing a range of technologies, the Swiss team has increased the maneuverability of a quadrotor drone in this new endeavor.
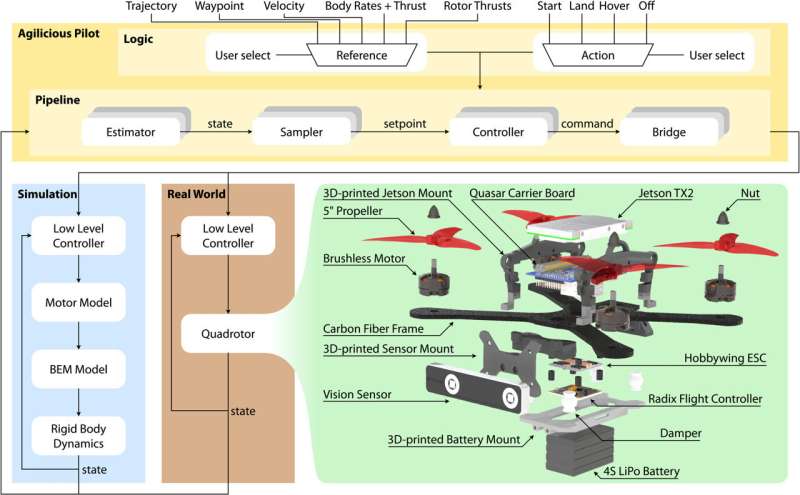
The new design involved adding onboard vision sensors, monitoring systems for flight control and a host of other components meant to improve the ability of the drone to receive and process flight information in real time. They also added an advanced AI module, NVIDIA Jetson TX2—one that is able to carry out complex tasks supporting the drone’s hardware quickly enough to allow for smooth agile flight.
The researchers tested their drone under a wide range of flights, from slow and steady, to full speed to obstacle avoidance. They found their drone capable of maintaining agility at speeds ranging from 50 to 70 kph. They also found it could conduct motion-capture trajectory tracking, where the drone continuously observes its position in the air and adds time instances to show where it is and when. They also tested its use in virtual reality simulations. And they also noted, that the system was able to learn as it went and because of that its performance improved over time.
The researchers’ drone surpassed rival systems in terms of agility as well as obstacle tracking and avoidance, according to the testing results. They claim that because to its improved performance, it might be utilized for time-sensitive real-world tasks including delivery of commodities and search and rescue operations. To enable anyone to adopt their idea, the team has also made both the software and hardware open source.