Researchers have designed and developed a new type of soft robot with the capacity to move more quickly on solid surfaces or even in the water than previous generations of soft robots. These soft robots were inspired by the biomechanics of cheetahs. They belong to a group classified as Leveraging Elastic Instabilities for Amplified Performance (LEAP) robots. The new soft silicone robotics are also capable of grabbing objects delicately or with sufficient strength to lift heavy objects. These are the fastest and flexible robots.
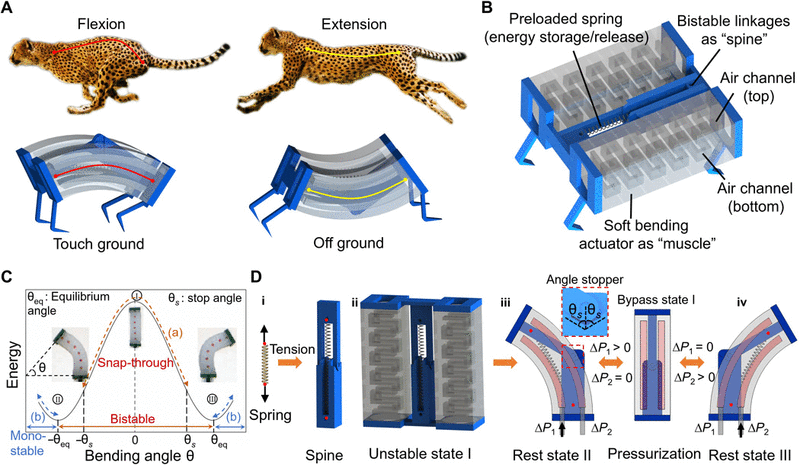
Jie Yin, an assistant professor of mechanical and aerospace engineering at North Carolina State University and co-author of the publication paper on the new soft robot designs had this to add…”Cheetahs are the fastest creatures on land, and they derive their speed and power from the flexing of their spines.”
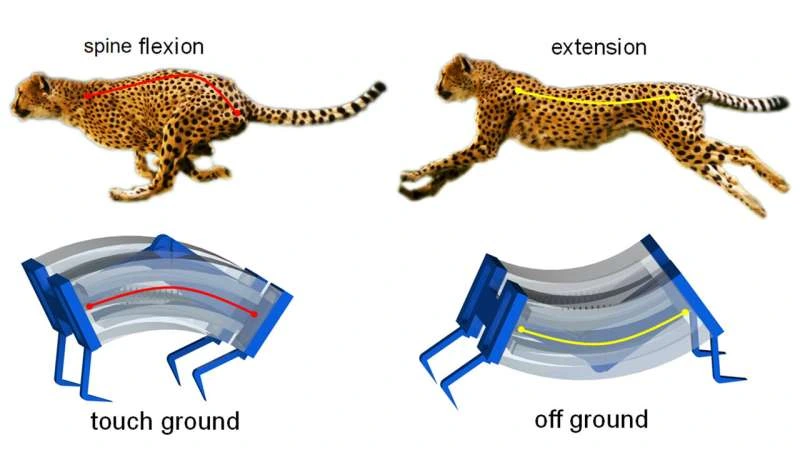
“My team and I were inspired by the cheetah to create a type of soft robot that has a spring-powered, ‘bistable’ spine. This is to say, the robot has two stable states,” Yin continued. “We can switch between these stable states rapidly by simply pumping air into channels that line the soft, silicone robot. However, switching between the two states releases a significant amount of energy, which allows the robot to quickly exert force against the ground. Galloping across the ground surface, its feet actually leaving the ground…”

“…the previous soft robots were crawlers, that remained in contact with the ground at all times. This limits their speed.”
The previous record has held that the fastest and flexible soft robots before now moved at speeds of up to 0.8 body lengths per second on flat, solid surfaces. However, this ew class of soft robots, “Leveraging Elastic instabilities for Amplified Performance” (LEAP), are able to acquire speeds of up to 2.7 body lengths per second. That is more than three times faster, with a frequency of about 3Hz. These new soft robots also have the added advantage of running up steep inclines, something that was very challenging or impossible for other previous soft robots that exert less force against the ground.
Conclusion
When asked, Jie Yin said, “We also demonstrated the use of several soft robots working together, like pincers, to grab objects. By tuning the force exerted by the robots, we were able to lift objects as delicate as an egg, as well as objects weighing 10 kilograms or more.”
These “galloping” LEAP robots are approximately 7 centimeters long and weigh about 45 grams. The researchers also demonstrated that the LEAP design could improve swimming speeds for soft robots. Attaching a fin, rather than feet, a LEAP robot was able to swim at a speed of 0.78 body lengths per second, as compared to 0.7 body lengths per second for the previous fastest swimming soft robot. Making them the fastest and flexible robots to be designed.
Read More
How to Build an SMS Based Metal Detector
How to Build a Wi-Fi based Smart Farm Monitoring System Project.