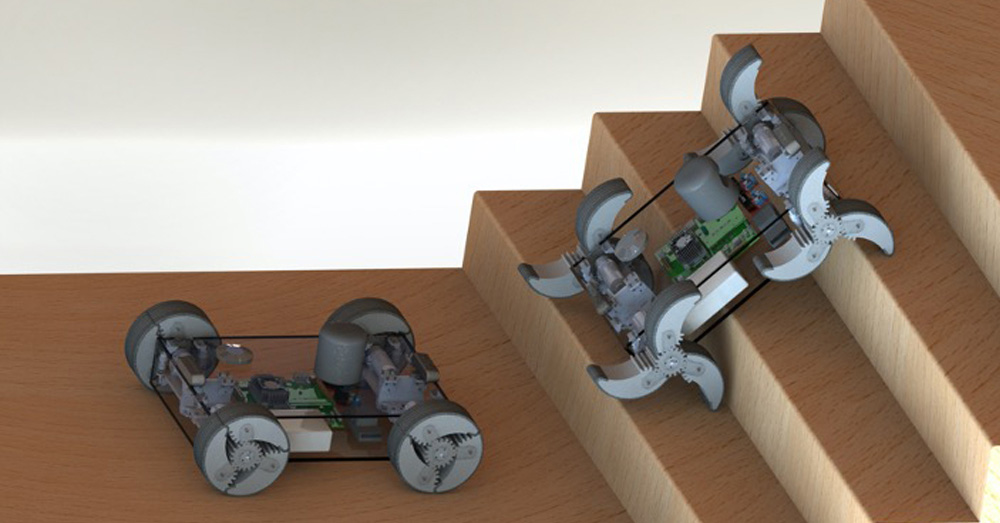
This Omnidirectional Wheel-leg Robot also called OmniWheg robot was created by researchers at Worcester Polytechnic Institute recently. This robot system can adapt its configuration while navigating its surrounding environment seamlessly, changing from a wheeled to a legged robot. This robot, introduced in an IEEE IROS 2022 paper, pre-published on arXiv, is based on an updated version of the so-called “whegs,” a series of mechanisms design to transform a robot’s wheels or wings into legs.
The researchers make they research on ‘anthropomorphization’. Qadruped and biped robots have been growing in popularity, and that might the reason why they making research on ‘anthropomorphization’ that the general audience commonly engages in, Prof. Andre Rosendo one of the researchers who developed the robot. While legs make robots more relatable, giving them a human- or animal-like quality, they are not always the optimal solution to ensure that robots complete tasks quickly and efficiently this is the key idea behind the recent work by Rosendo and his colleagues.

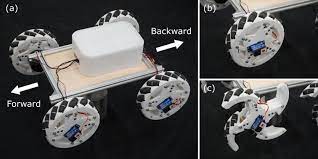
The team thus set out to create a system that can switch between different mechanisms instead of developing a robot with a single locomotion mechanism, hence Omnidirectional Wheel-leg Robot. In a series of studies that focused on a variety of real-world interior settings, including dodging obstacles, ascending steps of various heights, and turning or moving in all directions, the researchers assessed the performance of their OmniWheg system. . The team’s innovation may also serve as an inspiration for the creation of similar omnidirectional wheeled systems.
Read More
- Data on populations will be strengthened by new technology and increased processing capacity.
- The first radiation belt spotted outside of our solar system is being seen by astronomers
- The Paris Air Show Features Flying Taxis; the Olympics are Next
- Networks of nanowires Learn and retain information like a human brain
Conclusion
This Omnidirectional Wheel-leg Robot is just so amazing and its performance comes in handy at different terrains. Getting this robot on a DIY platform is just what makers and hobbyists need.