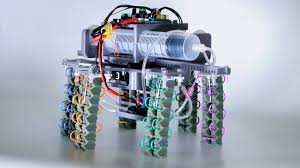
In the College of Engineering, electrical and computer engineering assistant professor Kirstin Petersen works. Her team developed a system of fluid-driven actuators that enable soft robots to achieve more complex motions. Their paper, “Harnessing Nonuniform Pressure Distributions in Soft Robotic Actuators,” was published Jan. 20 in Advanced Intelligent Systems.
“Soft robots have a very simple structure, but can have much more flexible functionality than their rigid cousins.” “They’re sort of the ultimate embodied intelligent robot,” Petersen said. “Soft robots are sort of the ultimate embodied intelligent robot,” Petersen says.
“Most soft robots these days are fluid-driven. In the past, most people have looked at how we could get extra bang for our bucks by embedding functionality into the robot material, like the elastomer. Instead, we asked ourselves how we could do more with less by utilizing how the fluid interacts with that material.”
Traditionally, a soft robot’s fluid-driven actuator—i.e., the part the moves, such as a limb—functions when evenly pressurized fluid flows through an elastomer bladder or bellow. They connected a series of bellows with slender tubes, running in a pair of parallel columns, all in a closed system. Tiny tubes induce viscosity, which causes the pressure to be distributed unevenly, bending the actuator. That would normally be a problem, but the team found a clever way to take advantage of it.
Matia developed a full descriptive model that could predict the actuator’s possible motions and anticipate how different input pressures, geometries, and tube and bellow configurations achieve them—all with a single fluid input. It can do so without the multiple inputs and complex feedback control that previous methods required, the researchers say.
“We detailed the full complement of methods by which you can design these actuators for future applications,” Petersen said. “We detailed the full complement of methods by which you can design these actuators for future applications,” she said.
Conclusion
Researchers at Cornell University’s College of Engineering have developed a system of fluid-driven actuators that enable soft robots to achieve more complex motions. The team’s paper, “Harnessing Nonuniform Pressure Distributions in Soft Robotic Actuators,” was published Jan. 20 in Advanced Intelligent Systems. “This is basically a whole new subfield of soft robotics,” researcher Angharad Petersen says.
Read More
- The first radiation belt spotted outside of our solar system is being seen by astronomers
- The Paris Air Show Features Flying Taxis; the Olympics are Next
- Networks of nanowires Learn and retain information like a human brain
- Data on populations will be strengthened by new technology and increased processing capacity.