When it comes to controlling DC motors, precision and flexibility are key. Whether you’re building a robot, a fan, or any other motorized gadget, mastering speed control is essential. Today, I’ll guide you through designing a DC motor speed control system using PWM (Pulse Width Modulation) with an Arduino Uno board. Plus, I’ll share insights into an upgraded version featuring the L293D motor driver module. Let’s get started!
What Is PWM and Why Does It Matter?
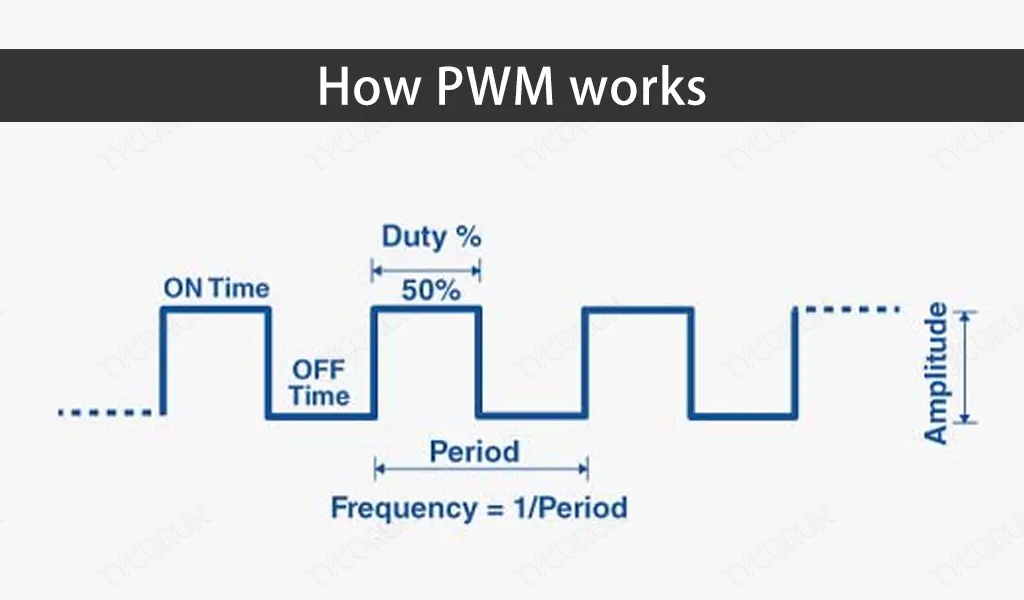
Imagine dimming the lights in your room. You’re not turning them off or on completely; instead, you’re adjusting the intensity. PWM works the same way, but for motors. It sends rapid on/off pulses to the motor, controlling the average voltage and, ultimately, the motor’s speed. Pretty cool, right?
How DC Motors React to PWM
DC motors interpret the duty cycle of PWM signals as speed commands. A higher duty cycle means faster rotation, while a lower one slows things down. By changing the pulse duration, you can fine-tune the motor’s performance with ease.
IoT-Enabled Asset Tracking Solutions in Industrial Settings
Why Choose Arduino for DC Motor Control?

The Arduino Uno makes motor control beginner-friendly and versatile. Its built-in PWM pins are perfect for sending those crucial pulses to your DC motor. Combine that with the endless possibilities of Arduino’s open-source ecosystem, and you’ve got yourself a game-changer.
Key Components for This Project
Here’s what you’ll need:
1. Arduino Uno

The brains of our project, managing PWM signal generation.
2. 5V DC Motor

A simple motor to test the basics of speed control.
3. Motor Driver Module L293D (for the upgraded version)

Enables safe and efficient control of higher voltage (12V) motors.
4. Power Supply

A 5V or 12V source, depending on your motor.
5. 10K-Ohm Potentiometer

Adjusts the PWM duty cycle manually.
6. Breadboard and Jumper Wires
For easy connections and experimentation.
7. 1N4007 Power Diode (for flyback protection)

Prevents voltage spikes from damaging your circuit.
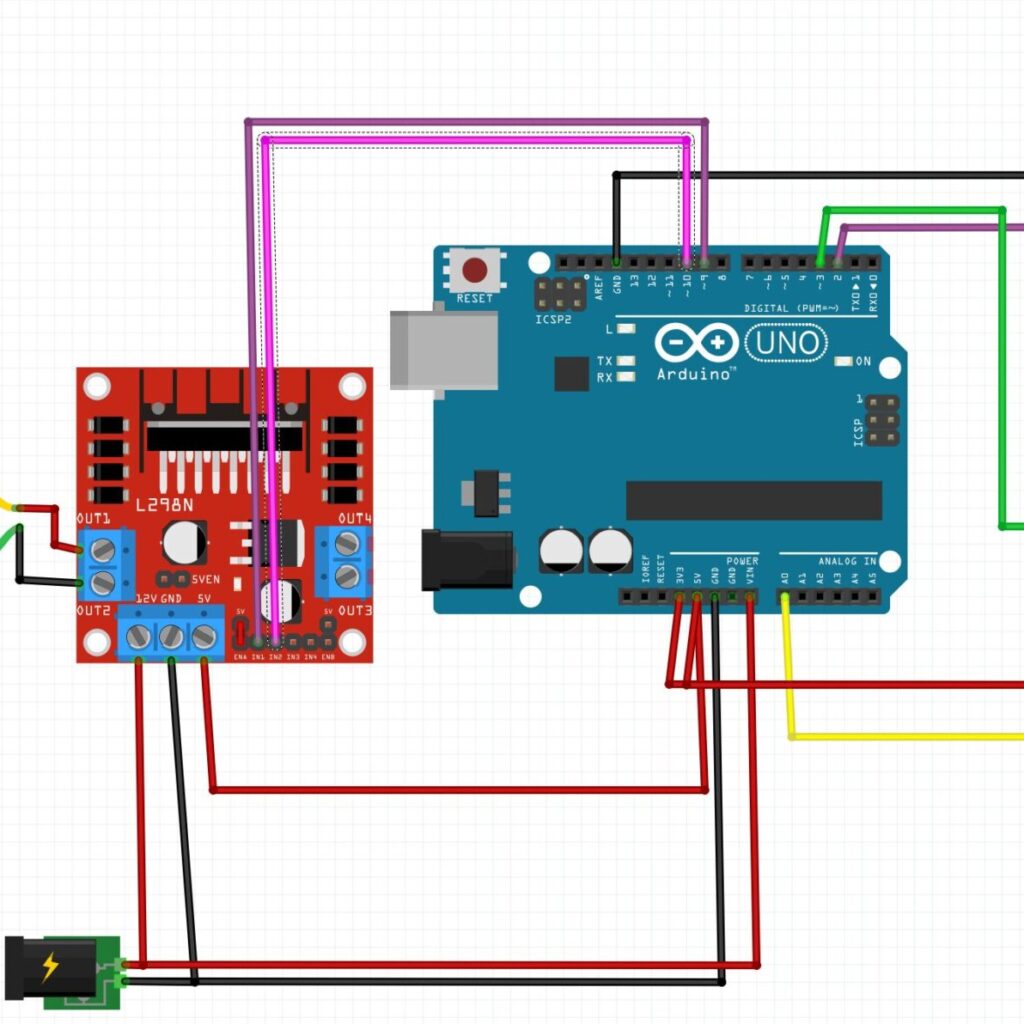
Understanding the Schematic Diagram

the Schematic Diagram above included a clear and labeled chart that showcases connections for the project
Setting Up the Basic DC Motor Control
Step 1: Connect the Components
- Hook up your Arduino Uno to the breadboard.
- Connect the DC motor to a PWM-capable pin (e.g., pin 9 or 10).
- Add a flyback diode across the motor terminals for safety.
Step 2: Arduino Code for the PWM Signal
Here’s the Arduino code snippet to control motor speed:
const int motorPin = 9; // PWM pin connected to motor
const int potPin = A0; // Analog pin connected to potentiometer
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
int potValue = analogRead(potPin); // Read potentiometer value
int motorSpeed = map(potValue, 0, 1023, 0, 255); // Map to PWM range
analogWrite(motorPin, motorSpeed); // Set motor speed
}
Upload this code, and voila! Your motor’s speed is now adjustable using the potentiometer.
Taking It to the Next Level: L293D Motor Driver Module
Why Use the L293D?

While the basic setup works for small motors, it’s not ideal for higher voltage or current requirements. The L293D motor driver module bridges that gap, letting you control 12V DC motors safely and efficiently.
Upgraded Schematic
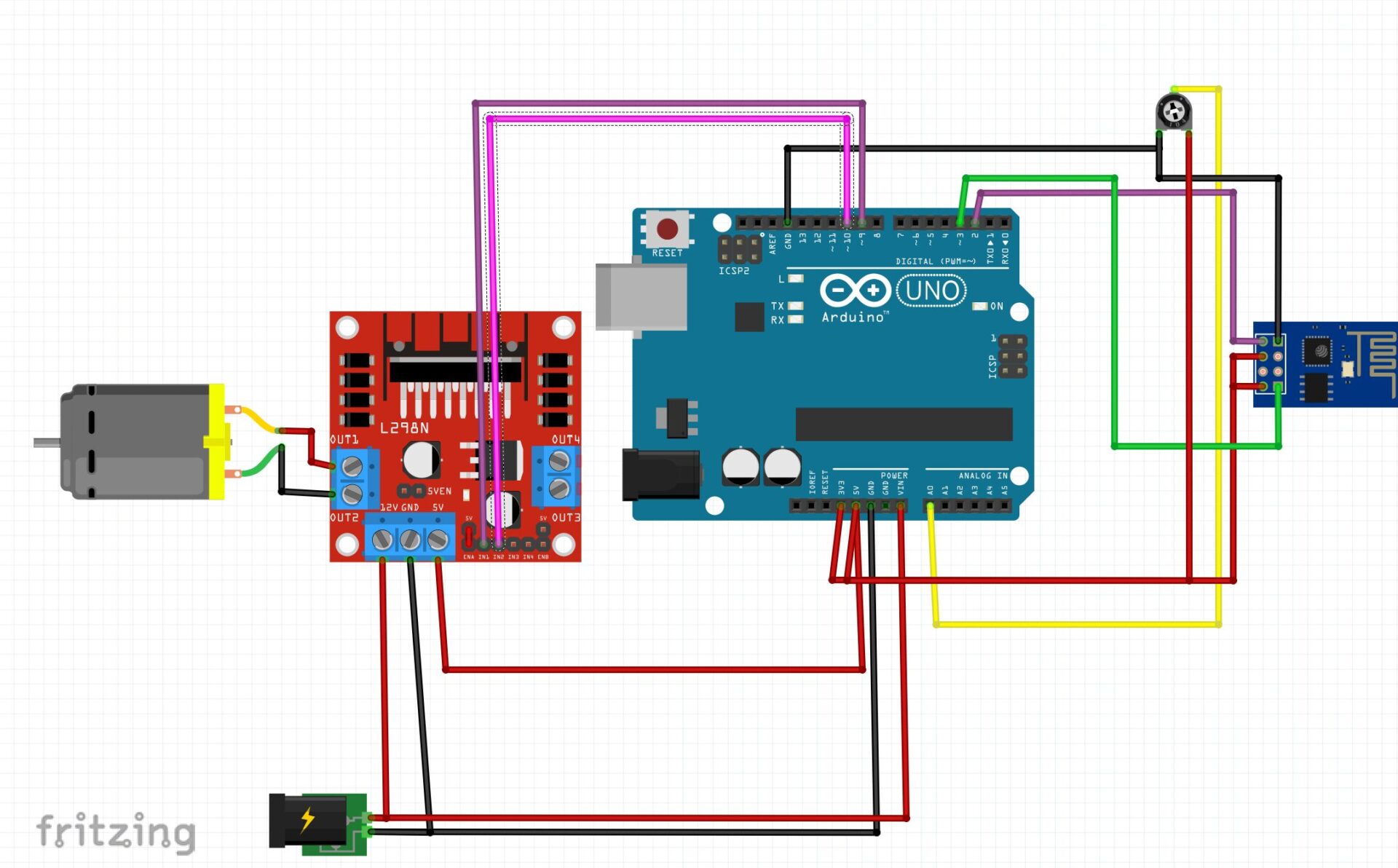
Modify the earlier schematic to include the L293D module. Connect as shown above in the schematic diagram. Try to connect:
- Arduino’s PWM pin to the L293D input pin.
- External 12V power supply to the motor via the L293D output.
Enhanced Code for L293D
const int enablePin = 9; // PWM pin for speed control
const int in1 = 2; // Control pin 1
const int in2 = 3; // Control pin 2
void setup() {
pinMode(enablePin, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
// Set motor direction
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
}
void loop() {
int potValue = analogRead(A0); // Read potentiometer
int motorSpeed = map(potValue, 0, 1023, 0, 255); // Map to PWM range
analogWrite(enablePin, motorSpeed); // Set motor speed
}
Now your motor can handle more demanding applications without breaking a sweat!
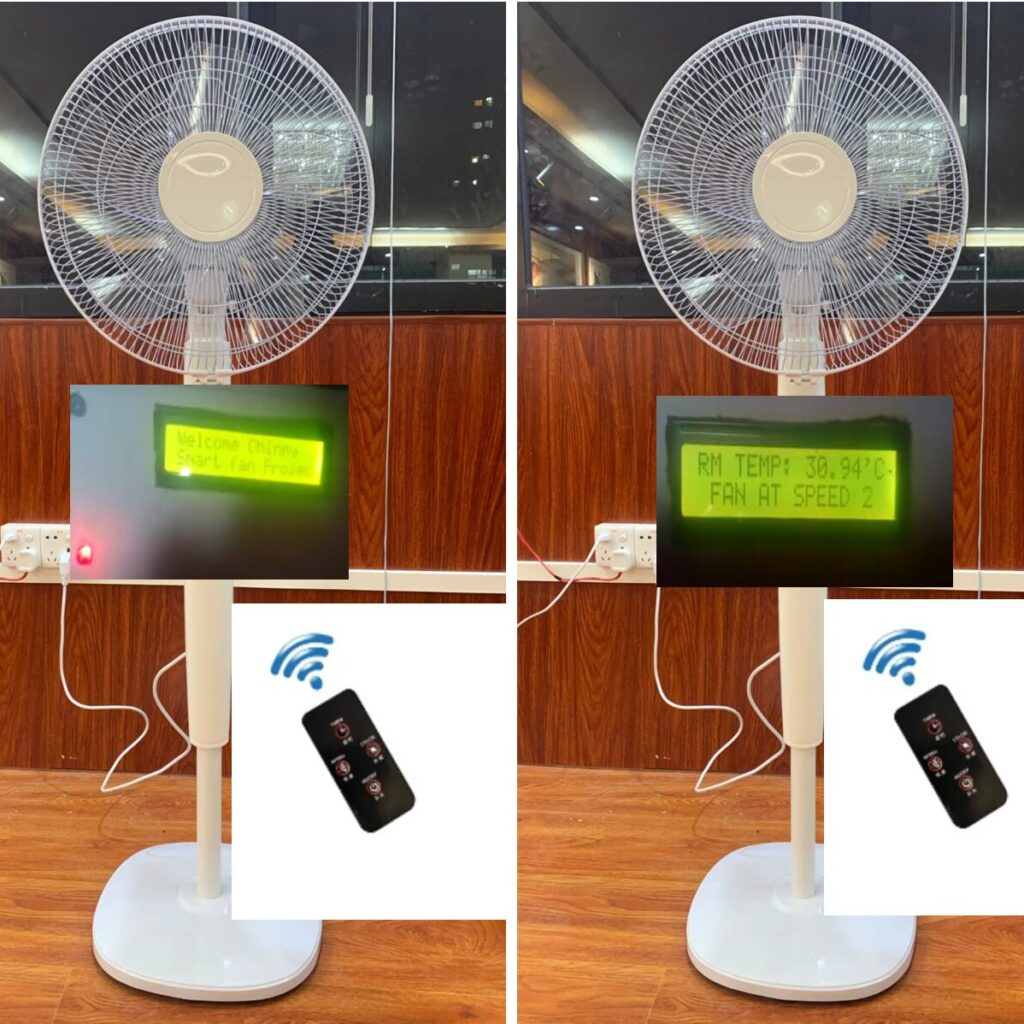
Results and Testing

Real-Life Applications of PWM Motor Control
1. Robotics
Precise speed control makes robots move smoothly and efficiently.
2. Fans and Pumps
Adjust airflow or liquid flow with ease.
3. DIY Gadgets
From conveyor belts to automated curtains, the possibilities are endless.
Troubleshooting Common Issues
1. Motor Not Spinning
- Check power supply connections.
- Ensure PWM pin configuration is correct.
2. Overheating Motor or Driver
- Verify current ratings.
- Add a heat sink if necessary.
3. Erratic Speed Control
- Inspect potentiometer wiring.
- Reduce noise with capacitors across the motor terminals.
Conclusion
Congratulations! You’ve learned how to control DC motor speed using PWM and explored an upgraded version with the L293D motor driver module. Whether you’re a hobbyist or a professional, mastering these techniques unlocks countless possibilities for your projects. So, roll up your sleeves and give it a try—the world of motors awaits!
FAQs
1. What is PWM, and why is it used in motor control?
PWM (Pulse Width Modulation) adjusts the motor’s speed by varying the duty cycle of the voltage signal, providing precise control without wasting energy.
2. Why do I need a motor driver module like L293D?
The L293D allows you to control higher voltage motors safely, providing additional protection and functionality.
3. Can I use this project for a 24V motor?
Yes, but you’ll need a compatible motor driver capable of handling 24V, like the L298N.
4. How do I ensure my motor doesn’t overheat?
Use a motor rated for your application, ensure proper ventilation, and add a heat sink if necessary.
5. What are some advanced features I can add to this project?
You could add direction control, Bluetooth connectivity, or even PID speed regulation for more precision.