Home – Smart Designs And Solutionstutorial guide on CCTV installations and maintenancesolar inverter installationsolar breakthrough3-phase distribution panel
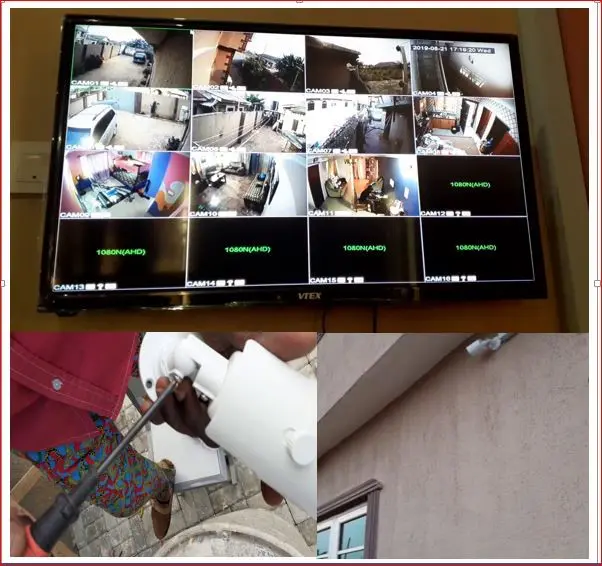
 tutorial guide on CCTV installations and maintenance
tutorial guide on CCTV installations and maintenance solar inverter installation
solar inverter installation solar breakthrough
solar breakthrough
 3-phase distribution panel
3-phase distribution panel